AXIS camera @ JOYCE 6.9.2022
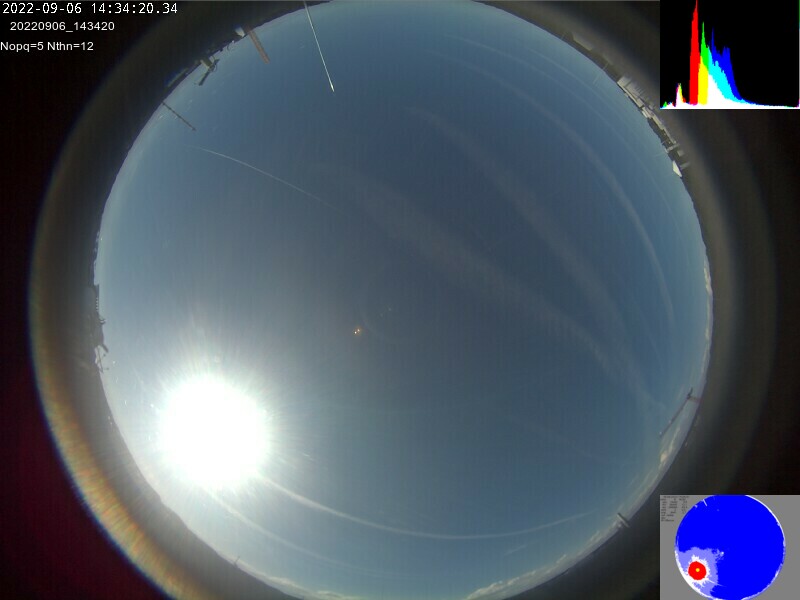
Images from Camera at JOYCE
at 50°54'30.0"N+6°24'47.1"E.
North is on top, east to the right. Move your mouse over the image.
Examples:
19.8.2016: cloud punch hole,
27.8.2016: tiny raining Cu,
22.9.2016: Halo,
7.10.2016: altocumulus,
10.10.2016: stationary but dynamic clouds,
1.3.2018: Moon with Halo,
27.4.2018: Halo,
6.6.2019: Wave cloud,
15.12.2019: contrails,
12.7.2020: half stationary Cu-hum ,
26.7.2020: Cs, Cu and Halo,
3.8.2020: Halo,
3.8.2020: sunset with Cu fr,
28.11.2020: dynamic Ac,
25.2.2021: Cs-len (kind of),
14.5.2021: Cu-precip ,
4.6.2021: nimbo stratus,
16.6.2021: slow Cu-hum,
28.6.2021: multiple layer Ac,
19.10.2021: Halo w sundogs,
stereo images,
...
Images made every 20sec with an
AXIS M3027-PVE Fixed Dome Network Camera,
for details see this page.
If its night and you see stars check here.
If its daytime and you see contrails check here.
This is an 800x600 30% compression JPG image. For a maximum resolution image see here
See also ...
cloudmask
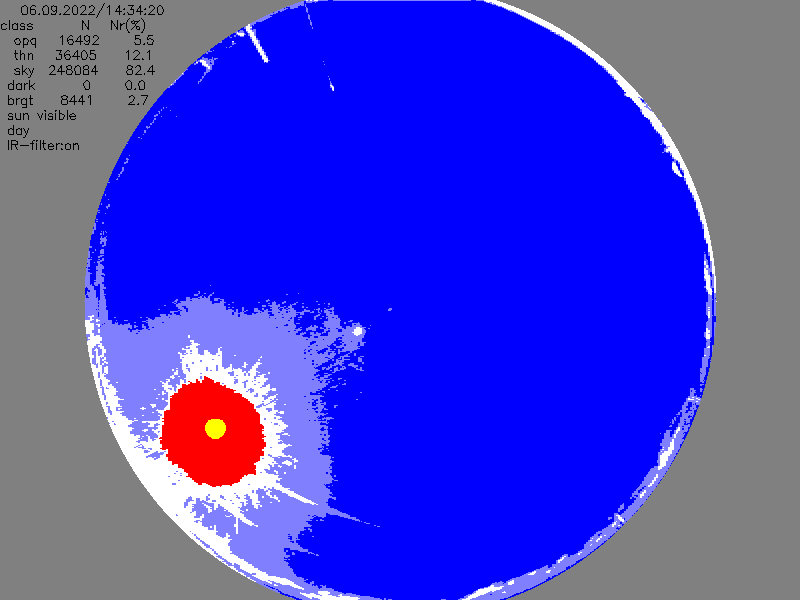
Cloudmask made with idl. Click on image to see animated sequence.
Panorama

Panorama - made from sky image. Click on image to see animation.
position of the sun
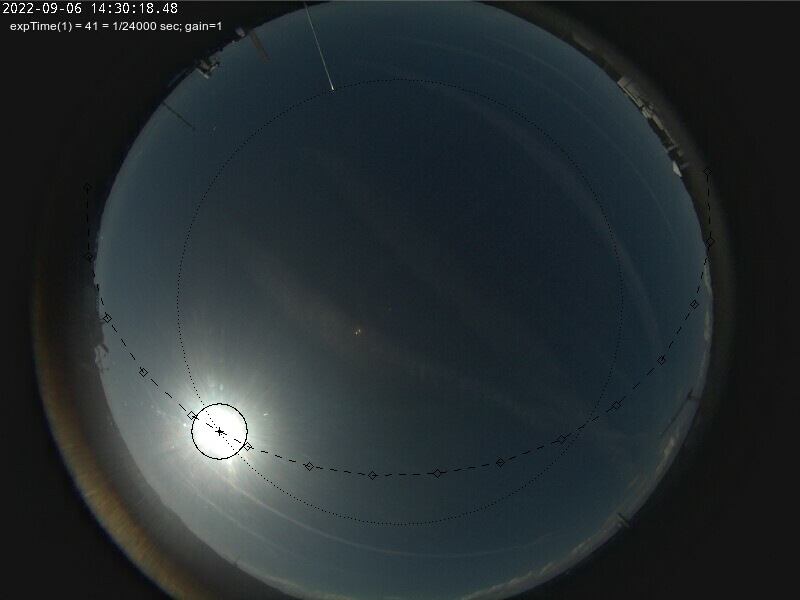
Position of the sun in image with shortest exposure time.
Almukantar scan
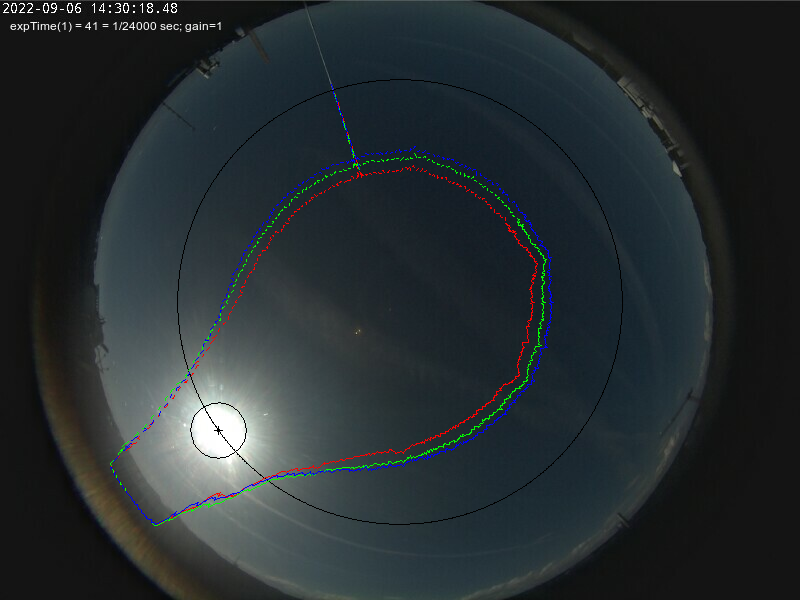
Almukantar scan in image.
exposure Time

Exposure Time 1/12000sec (left) and 1/23sec (right), click on image to see full range of exposure times.
Gain


Gain 9dB (left) and 42dB (right), click onimage to see full range of Gains.
Gain is the amplification factor used to digitize the CCD measurements.
Cloud motion vectors
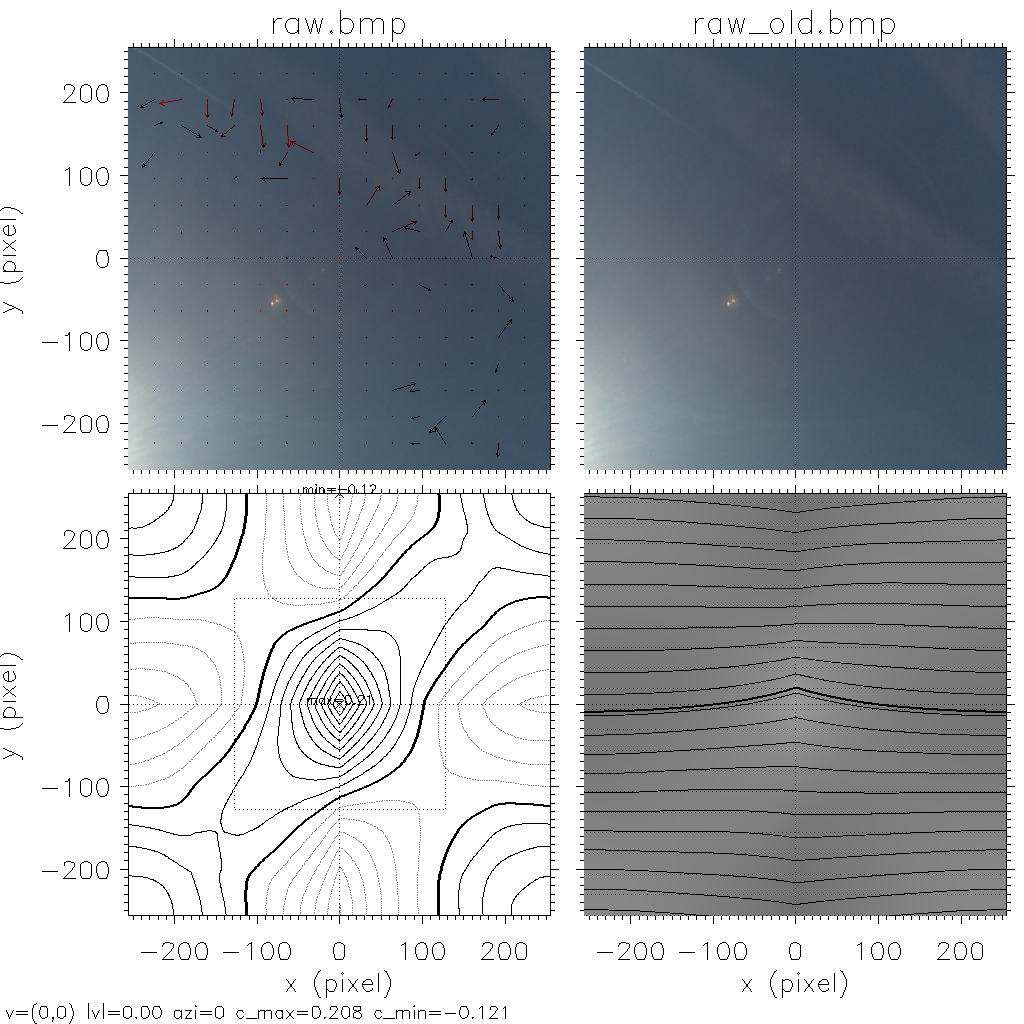
Cloud motion vectors derived from two consecutive images.
Top: the two images (45deg around zenith, rectified),
bottom: cross-correlation between these two images as isolines (left with 0.02 spacing) and grayscale (right, black=-1, white=+1).
The maximum in the cross correlation idenditfies the shift to achieve maximum agreement between both images
The thick vector in the center of the left image is derived from the whole image.
The thinner vectors are derived from sub-images.
Click on image to see more.
IR FIlter
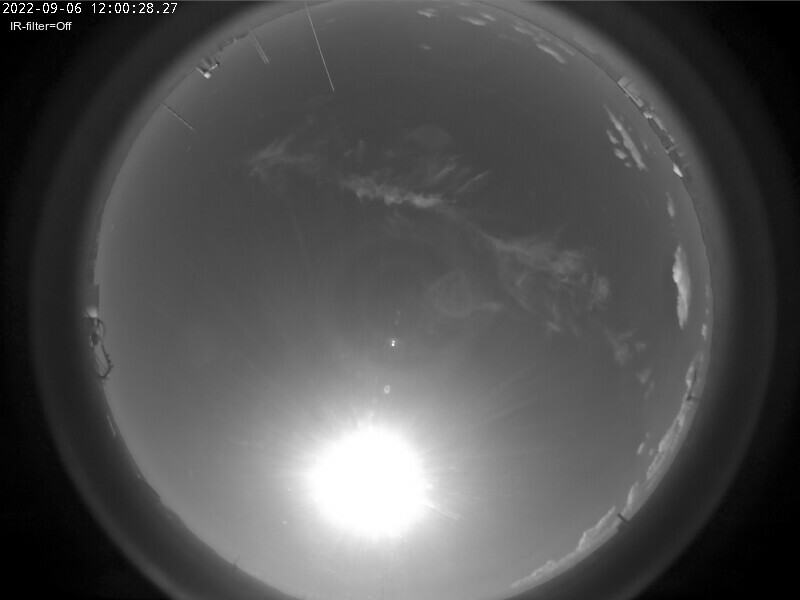

IR filter Off (left) and On (right), click on image to compare.
CCD are relative sensitive in the near IR spectral range. To ensure good color representaion usually an IR-filter is used.
This camera has the possibility to move the IR-filter away (mechanically) which leads to higher sensitivity.
Stripe
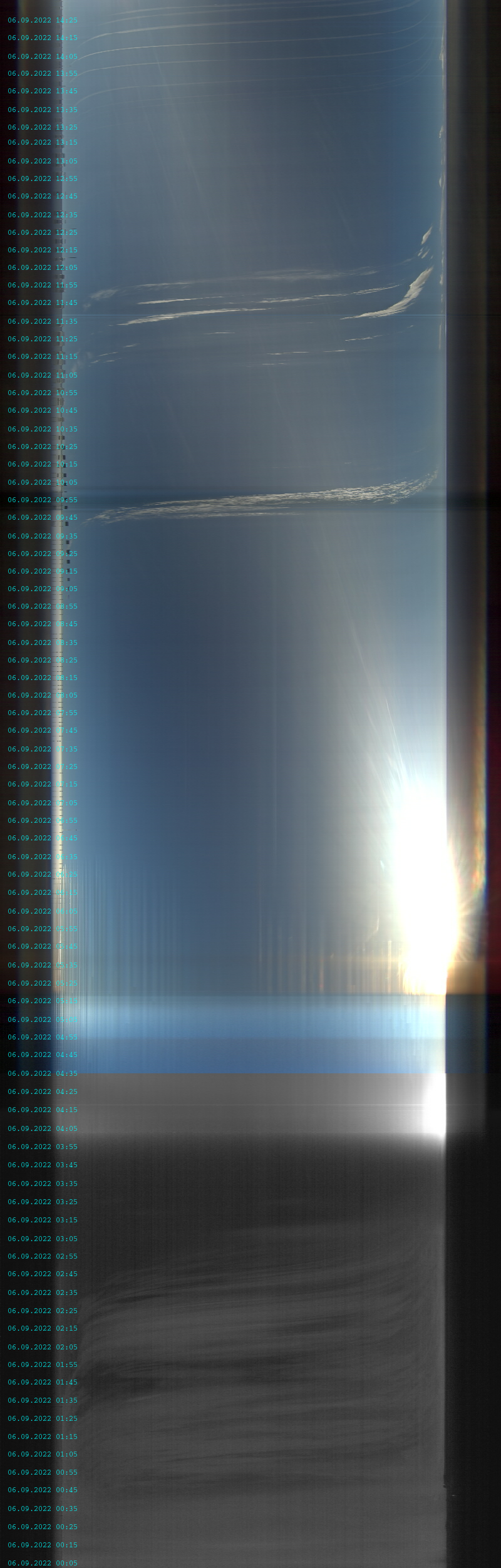
Every line in this image represents a horizontal 'scan'-line through the center (i.e. zenith) of an original image.
Subsequent lines are at 20sec distance starting at 00:00UTC at the bottom.